Development of Torque Vectoring Controls for an Electric Vehicle - Dissertation
The objective of my dissertation is to develop an active torque vectoring controller for an AWD electric vehicle utilizing four in hub motors. Investigating performance, accuracy, and computational time in a SiL environment.
Linear Quadratic Regulator developed with a linear model, including integrator action to track the desired yaw rate reference for a neutral steering vehicle.
Pacejka 6.1 tire model used, which accounts for camber angle and tire pressure, to accurately model tire to road interaction for Hoosier R25B 16×7.5”.
Linear Quadratic Regulator tuned using a 7-DoF vehicle model, and evaluated using performance indicators such as, root mean square of the tracking error and integral of the absolute value of the control action.
Torque vectoring system is investigated for its performance, in terms of performance indicators and real-time capability, for varying sampling rates.
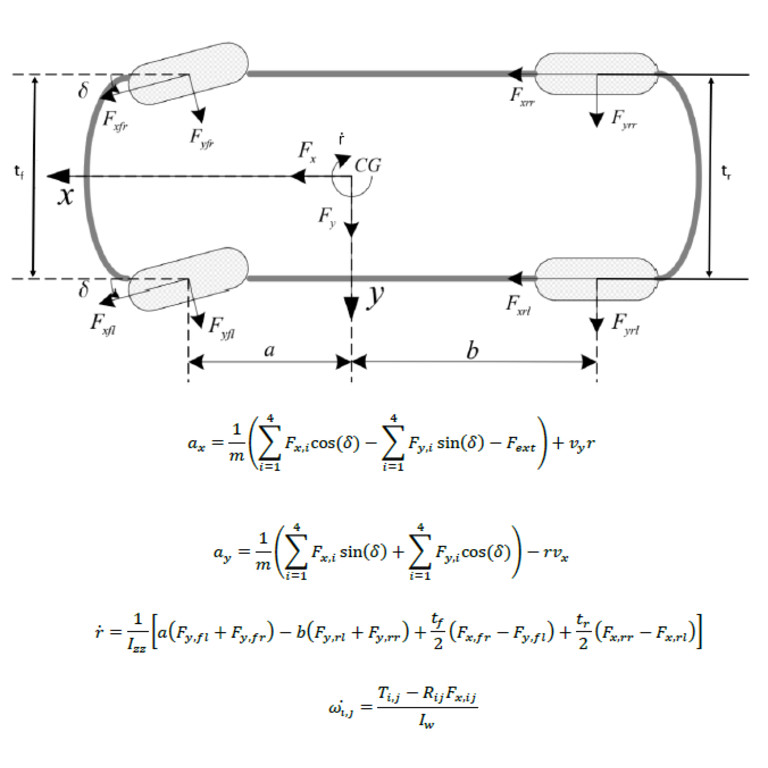
Equations of motion for a 7-DoF vehicle model
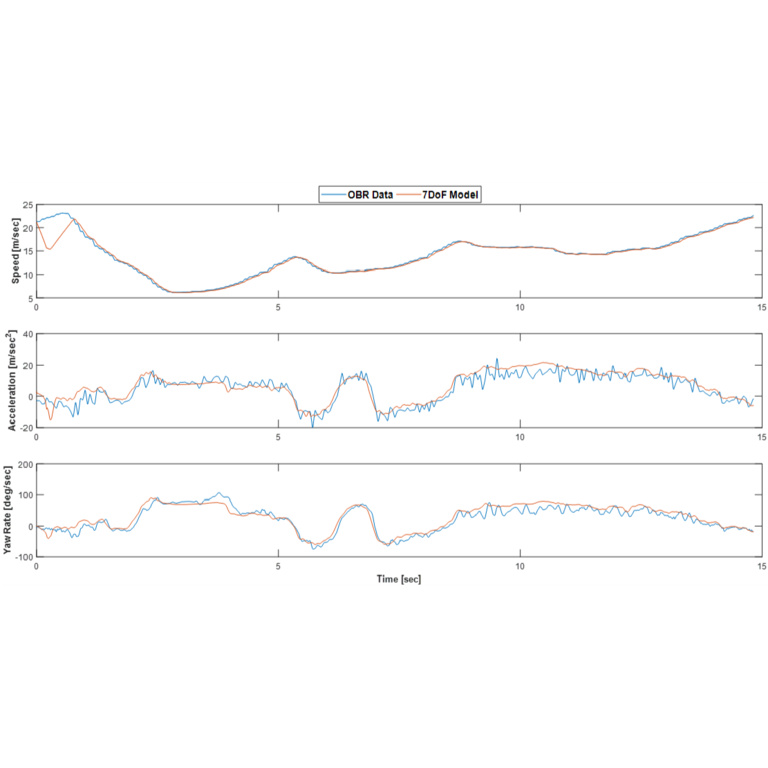
Validation of 7-DoF vehicle model against track data
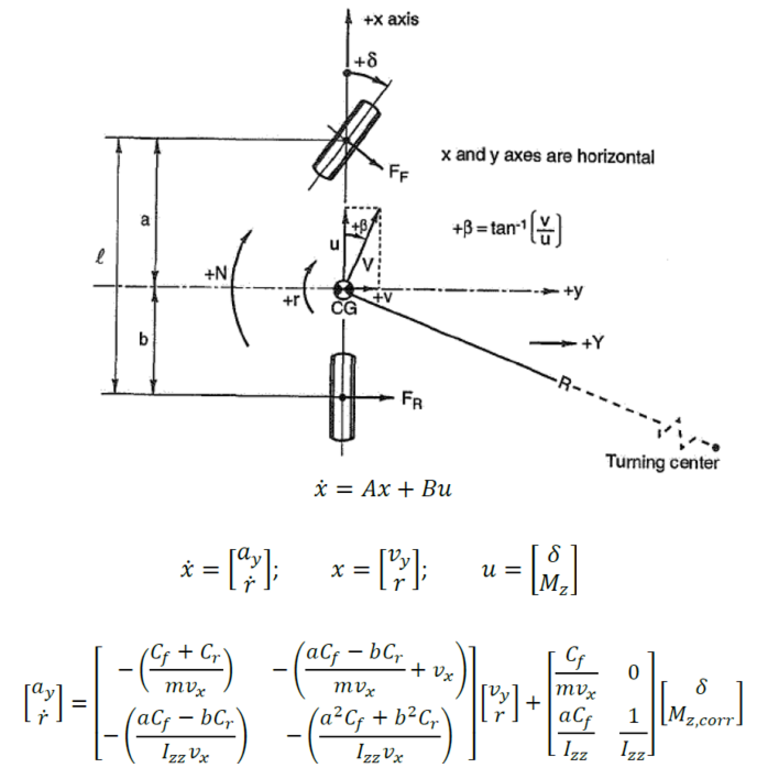
State space representation of 2-DoF bicycle model with corrective yaw moment
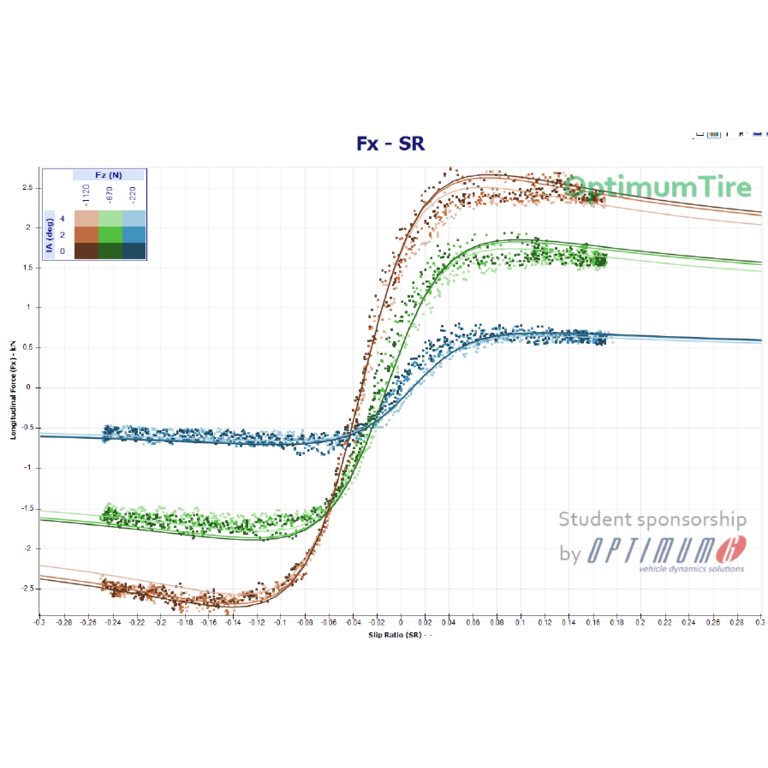
Tire data fitting for Pacejka 6.1 tire model using Optimum Tire
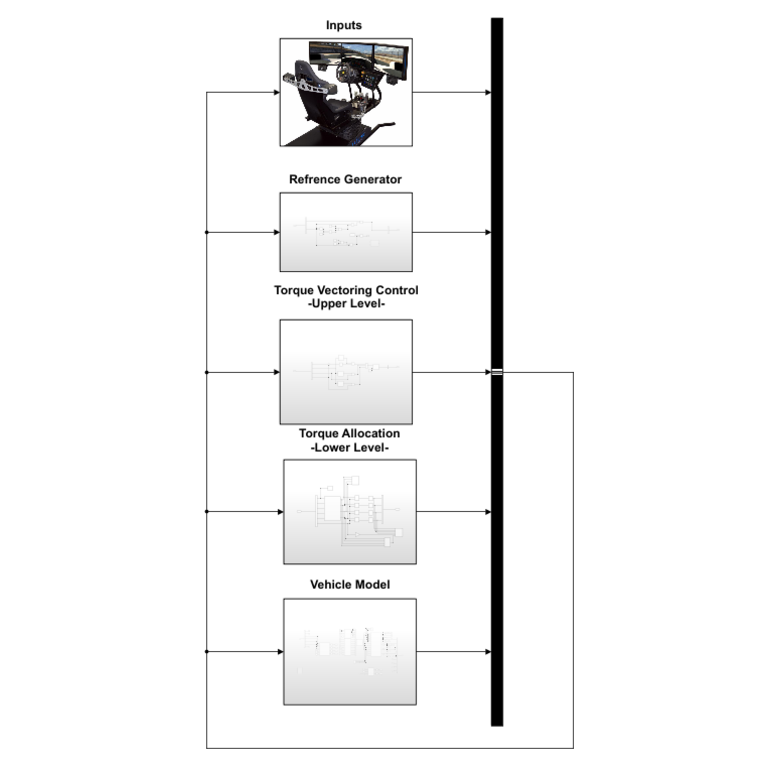
Simulink SiL architecture
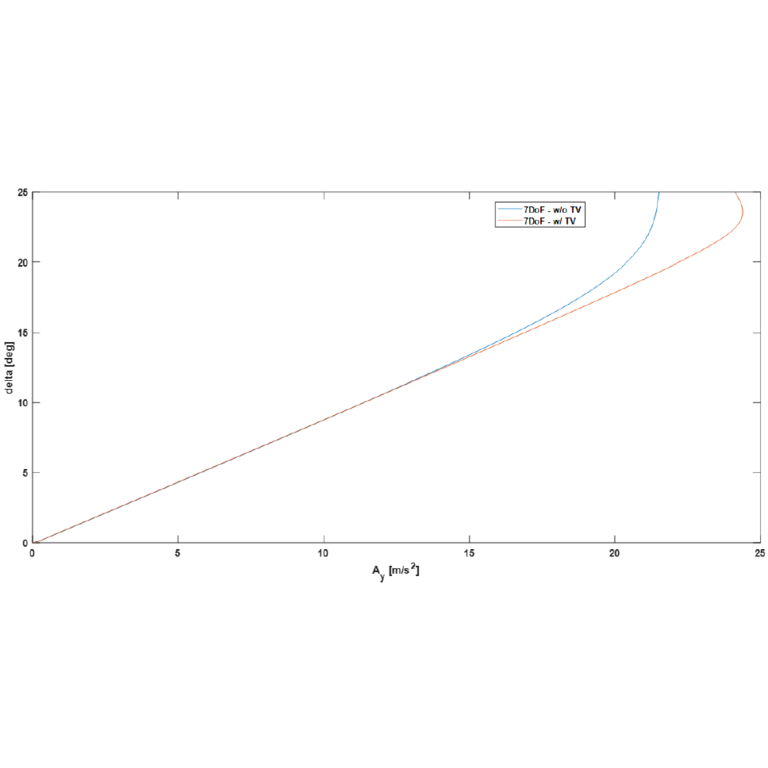
Lateral performance gain with torque vectoring
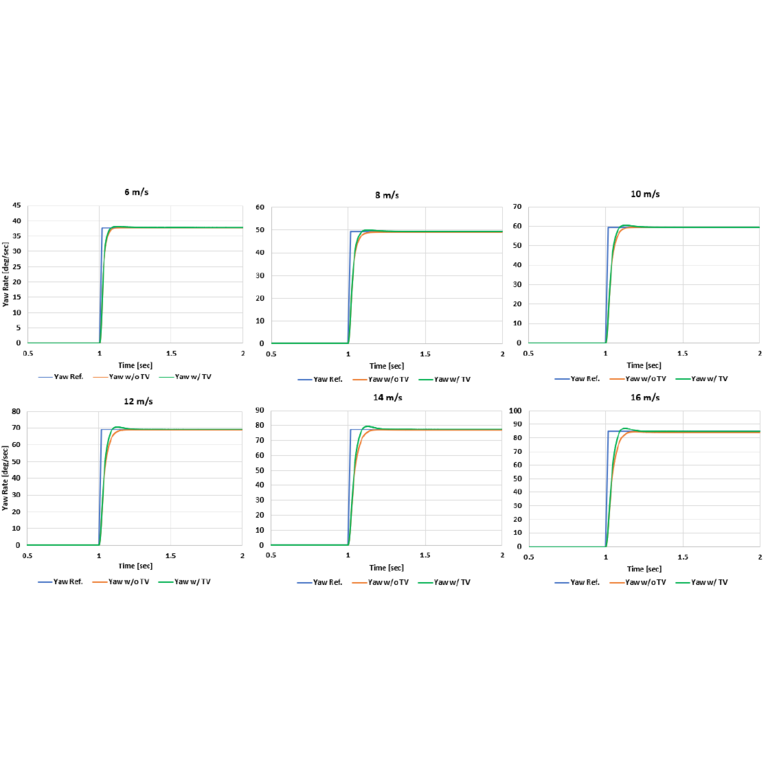
Yaw rate response comparison of bicycle model with and without torque vectoring
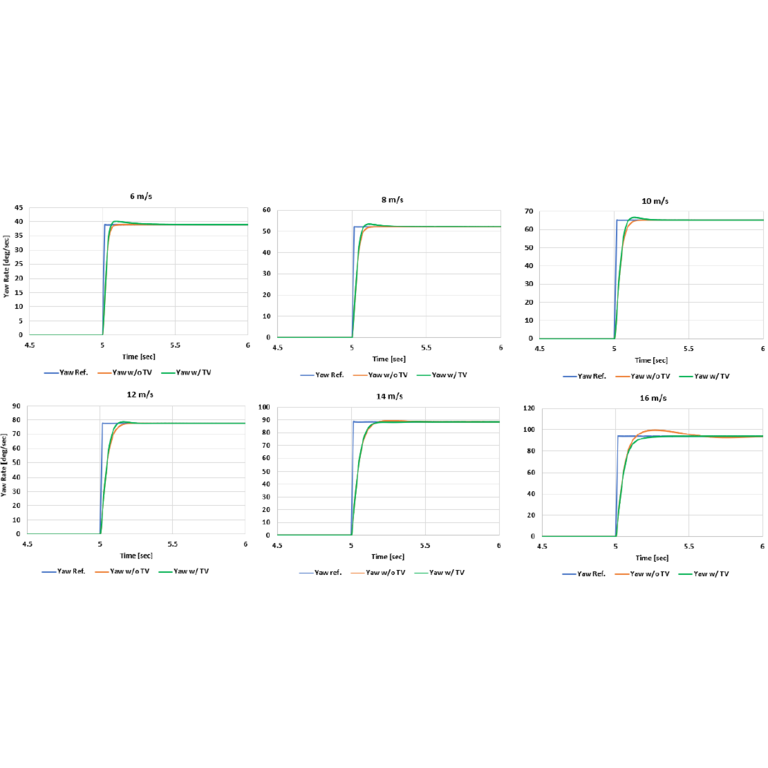
Yaw rate response comparison of 7-DoF vehicle model with and without torque vectoring